Our range of services includes a unique and high-value solution – mobile laser scanning. This service allows us to collect spatial data while driving, many times faster and more efficiently than with traditional surveying methods. We use the state-of-the-art Leica Pegasus TRK EVO mobile laser scanning system, which captures not only dense point clouds but also 360° panoramic images (street-view style) and high-accuracy photos of road surfaces, as well as walls, ceilings, and structures of tunnels, bridges, or other facilities by adjusting the camera position. The data collected with this system is highly unique and offers tremendous added value across numerous fields of application. Within the Leica TRK series, the EVO model delivers the highest level of accuracy, enabling surveying tasks where no compromises can be made – for example, railway and other infrastructure projects where every millimeter matters.
Leica TRK EVO is designed for high-precision mobile mapping of roads, railways, and other infrastructure assets.
- Fast: captures up to 2.2 million points per second
- Accuracy: 1mm
- Lots of data: point cloud, 360° panoramic images, and high-resolution photos of road surfaces, roadsides, bridge undersides, and tunnel walls.
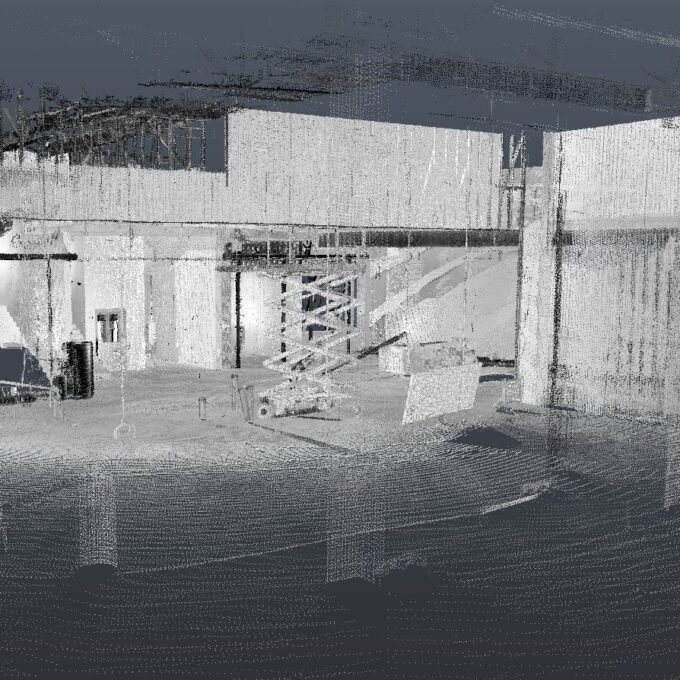
The system ensures highly detailed results even in complex and confined environments.
Mobile laser scanning with the TRK EVO is ideal for highly accurate documentation of tunnels, bridges, roads, and other environments. The dense point cloud enables precise measurements, deformation monitoring, pavement smoothness assessment, structural modeling, and safety evaluations.
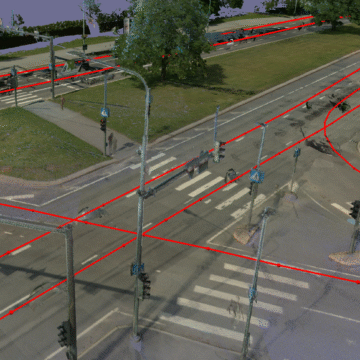
For infrastructure projects, the data captured with the TRK EVO supports efficient documentation of utility networks (overhead lines, poles, railway insulators, sleeper spacing), corridor mapping, preparation of topographic base maps, as-built surveys, and the creation of as-built drawings. Consistent point distribution and accurate georeferencing enable clearance checks, asset inventory, and the planning of maintenance or upgrades.
Results and outputs of mobile laser scanning
Point cloud
The point cloud generated by mobile laser scanning is a detailed, full-area dataset that can be used both for independent processing and for documenting existing conditions. A point cloud makes it possible to accurately compare different time periods, detect changes, and use it as evidence in case of disputes or for quality control. In addition, point clouds can be easily integrated into design software or GIS environments to create base maps, surface models, or perform volume calculations. This makes the point cloud a flexible tool across many fields.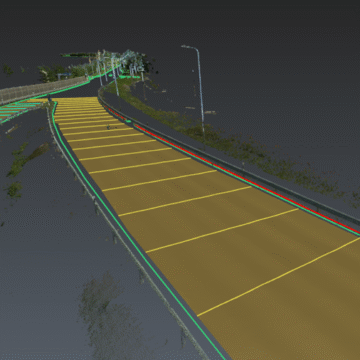
Vectorization and 2D drawings
From the point cloud, accurate drawings and models are produced for design and documentation purposes. During vectorization, point cloud data is processed into formats usable in CAD or 3D software. In the road sector, it is common to vectorize roadway edges, centerlines, pavement markings, posts, slopes, and ditches. The advantage of vectorizing from a point cloud is that the entire area is covered with measured points, allowing longitudinal or cross-sections to be generated in the model or drawing at intervals of just a few millimeters if needed.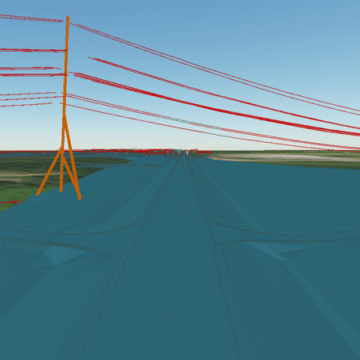
3D model
Transforming a point cloud into a 3D model makes it possible to represent virtually anything the client requires. Examples include the road surface, roadway geometry, pavement markings, railway sleepers, and embankments. In addition, the model can include traffic signs, posts, barriers, culverts, vegetation, and the surrounding landscape.
Get a quote for laser scanning
Other services
-

Topo-geodetic base plan
The topo-geodetic base plan is a map of the surveyed area, which gives the site plan view of the...
Read more -

Post-construction survey
To most of us, a post-construction survey may visually appear like a geo-survey and often raises the...
Read more -

Structural geodesy
Construction geodesy is needed throughout the construction process. Right from the start of...
Read more -

As-built survey
The as-built survey is a process in the field of geodesy where works carried out during construction...
Read more -

Building surveying
The point cloud obtained from laser scanning is a set of millions of individual points that...
Read more -

Laser scanning
Laser scanning is the leading technological...
Read more -
Point cloud
The point cloud is an indispensable tool in the fields of planning and construction, property...
Read more -

Digital twin
Three-dimensional planning has been used by architects and designers in the building sector for over...
Read more -

Land readjustment services
All land readjustment services will be carried out through the Land Registry's master plan. For...
Read more -
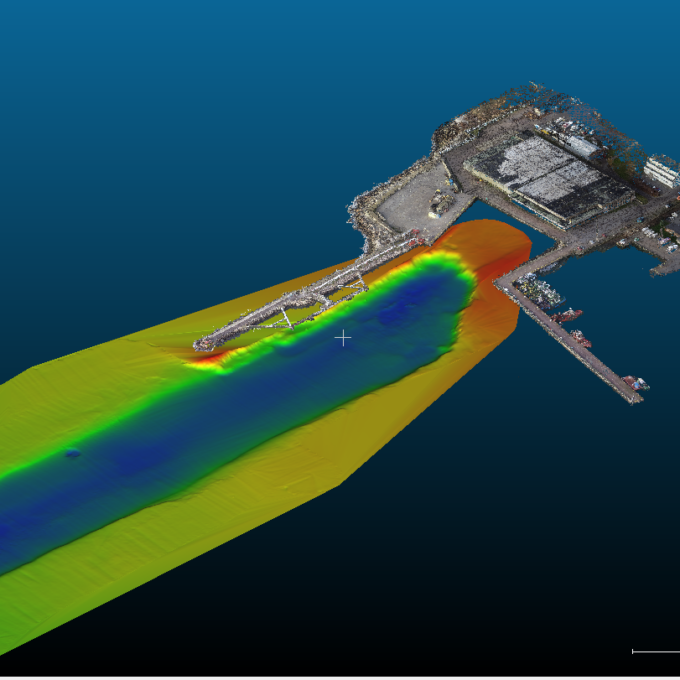
Hydrographic surveys
Hydrographic surveys are mostly used to measure water depths, volume calculations for dredging,...
Read more -

Building regularisation
We can assist you in regularising...
Read more